
Fundamentals of
Digital Logic
and
Microcontrollers

Fundamentals of
Digital Logic
and
Microcontrollers
Sixth Edition
M. RAFIQUZZAMAN, Ph.D.
Professor
California State Polytechnic University, Pomona
and
President
Rafi Systems, Inc.
Copyright © 2014 by John Wiley & Sons, Inc. All rights reserved.
Published by John Wiley & Sons, Inc., Hoboken, New Jersey.
Published simultaneously in Canada.
No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form
or by any means, electronic, mechanical, photocopying, recording, scanning or otherwise, except as
permitted under Section 107 or 108 of the 1976 United States Copyright Act, without either the prior
written permission of the Publisher, or authorization through payment of the appropriate per-copy fee
to the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923, (978) 750-8400, fax
(978) 646-8600, or on the web at www.copyright.com. Requests to the Publisher for permission should be
addressed to the Permissions Department, John Wiley & Sons, Inc., 111 River Street, Hoboken, NJ 07030,
(201) 748-6011, fax (201) 748-6008, or online at http://www.wiley.com/go/permissions.
Limit of Liability/Disclaimer of Warranty: While the publisher and author have used their best
efforts in preparing this book, they make no representation or warranties with respect to the accuracy
or completeness of the contents of this book and specically disclaim any implied warranties of
merchantability or tness for a particular purpose. No warranty may be created or extended by sales
representatives or written sales materials. The advice and strategies contained herein may not be suitable
for your situation. You should consult with a professional where appropriate. Neither the publisher nor
author shall be liable for any loss of prot or any other commercial damages, including but not limited to
special, incidental, consequential, or other damages.
For general information on our other products and services or for technical support, please contact our
Customer Care Department within the United States at (800) 762-2974, outside the U.S. at (317) 572-3993
or fax (317) 572-4002.
Wiley also publishes its books in a variety of electronic formats. Some content that appears in print may
not be available in electronic formats. For more information about Wiley products, visit our web site at
www.wiley.com
Library of Congress Cataloging-in-Publication Data:
Raquzzaman, Mohamed.
[Fundamentals of digital logic and microcomputer design]
Fundamentals of digital logic and microcontrollers / M. Raquzzaman. – Sixth edition.
pages cm
Revised edition of: Fundamentals of digital logic and microcomputer design.
Includes index.
ISBN 978-1-118-85579-9 (cloth)
1. Logic circuits. 2. Microcomputers–Design and construction. 3. Electronic digital computers–Circuits.
I. Title.
TK7888.4.R34 2014
621.39ʹ5–dc23
2014017642
Printed in the United States of America.
10 9 8 7 6 5 4 3 2 1
To my wife, Kusum; son, Tito; daughter-in-law,
Trina; and my grandchildren
In memory of my brother Elan

vii
PREFACE xiii
1: INTRODUCTION TO DIGITAL SYSTEMS 1
1.1 Explanation of Terms 2
1.2 Design Levels 6
1.3 Combinational and Sequential Circuits 7
1.4 Digital Integrated Circuits 7
1.4.1 Diodes 7
1.4.2 Transistors 8
1.4.3 MOS Transistors 14
1.5 Integrated Circuits (ICs) 18
1.6 CAD (Computer-Aided Design) 19
1.7 Evolution of the Microcontroller 20
1.8 Typical Microcontroller Applications 21
1.8.1 A Simple Microcontroller Application 22
1.8.2 Embedded Controllers 23
2: NUMBER SYSTEMS AND CODES 25
2.1 Number Systems 25
2.1.1 General Number Representation 25
2.1.2 Converting Numbers from One Base to Another 28
2.2 Unsigned and Signed Binary Numbers 30
2.3 Codes 34
2.3.1 Binary-Coded-Decimal Code (8421 Code) 34
2.3.2 Alphanumeric Codes 35
2.3.3 Excess-3 Code 36
2.3.4 Gray Code 37
2.3.5 Unicode 39
2.4 Fixed-Point and Floating-Point Representations 40
2.5 Arithmetic Operations 41
2.5.1 Binary Arithmetic 41
2.5.2 BCD Arithmetic 51
2.6 Error Correction and Detection 53
Questions and Problems 55
CONTENTS
viii Contents
3: BOOLEAN ALGEBRA AND DIGITAL LOGIC GATES 59
3.1 Basic Logic Operations 59
3.1.1 NOT Operation 59
3.1.2 OR operation 60
3.1.3 AND operation 62
3.2 Other Logic Operations 64
3.2.1 NOR operation 64
3.2.2 NAND operation 64
3.2.3 Exclusive-OR operation (XOR) 65
3.2.4 Exclusive-NOR Operation (XNOR) 66
3.3 IEEE Symbols for Logic Gates 67
3.4 Positive and Negative Logic 68
3.5 Boolean Algebra 69
3.5.1 Boolean Identities 70
3.5.2 Simplication Using Boolean Identities 72
3.5.3 Consensus Theorem 74
3.5.4 Complement of a Boolean Function 75
3.6 Standard Representations 76
3.7 Karnaugh Maps 80
3.7.1 Two-Variable K-map 81
3.7.2 Three-Variable K-map 82
3.7.3 Four-Variable K-map 85
3.7.4 Prime Implicants 87
3.7.5 Expressing a Boolean function in Product-of-sums (POS)
form using a K-map 89
3.7.6 Don’t Care Conditions 91
3.7.7 Five-Variable K-map 95
3.8 Quine–McCluskey Method 96
3.9 Implementation of Digital Circuits with NAND, NOR, and
Exclusive-OR/Exclusive-NOR Gates 97
3.9.1 NAND Gate Implementation 98
3.9.2 NOR Gate Implementation 99
3.9.3 XOR / XNOR Implementations 102
Questions and Problems 106
4: COMBINATIONAL LOGIC 109
4.1 Basic Concepts 109
4.2 Analysis of a Combinational Logic Circuit 109
4.3 Design of a Combinational Circuit 110
4.4 Multiple-Output Combinational Circuits 112
4.5 Typical Combinational Circuits 114
4.5.1 Comparators 114
4.5.2 Decoders 118
4.5.3 Encoders 122
4.5.4 Multiplexers 127
4.5.5 Demultiplexers 129
4.5.6 Binary / BCD Adders and Binary Subtractors 129
4.6 IEEE Standard Symbols 136
Contents ix
4.7 Read-Only Memories (ROMs) 138
4.8 Programmable Logic Devices (PLDs) 140
4.9 Commercially Available Field Programmable Devices (FPDs) 144
4.10 HARDWARE DESCRIPTION LANGUAGE (HDL) 146
4.11 Verilog basics 148
4.11.1 Verilog keywords 148
4.11.2 A typical Verilog Segment 148
4.11.3 Verilog operators 151
4.11.4 Verilog Constants 152
4.11.5 Modeling logical conditions in a circuit 152
4.11.6 Verilog if-else and case-endcase structures 153
4.11.7 A typical Verilog Simulator 153
4.12 Verilog modeling examples for combinational circuits 155
4.12.1 Structural modeling 155
4.12.2 Dataow modeling 161
4.12.3 Behavioral modeling 163
Questions and Problems 168
5: SEQUENTIAL LOGIC 173
5.1 Basic Concepts 173
5.2 Latches and Flip-Flops 173
5.2.1 SR Latch 174
5.2.2 Gated SR Latch 176
5.2.3 Gated D Latch 176
5.2.4 Edge-Triggered D Flip-Flop 177
5.2.5 JK Flip-Flop 180
5.2.6 T Flip-Flop 181
5.3 Flip-op timing parameters for edge-triggered ip-ops 181
5.4 Preset and Clear Inputs 182
5.5 Summary of the gated SR latch and the Flip-Flops 182
5.6 Analysis of Synchronous Sequential Circuits 185
5.7 Types of Synchronous Sequential Circuits 188
5.8 Minimization of States 188
5.9 Design of Synchronous Sequential Circuits 190
5.10 Design of Counters 196
5.11 Examples of Synchronous Sequential Circuits 201
5.11.1 Registers 201
5.11.2 Modulo-n Counters 203
5.11.3 Random-Access Memory (RAM) 206
5.12 Algorithmic State Machines (ASM) Chart 207
5.13 Asynchronous Sequential Circuits 214
5.14 Verilog description of typical synchronous sequential circuits 217
Questions and Problems 235
6: CPU, MEMORY, AND I/O 243
6.1 Design of the CPU 243
6.1.1 Register Design 244
6.1.2 Arithmetic Logic Unit (ALU) 244
6.1.3 ALU Design 255
x Contents
6.1.4 Control Unit Design 257
6.2 Memory Organization 280
6.2.1 Types of Main memory 283
6.2.2 READ and WRITE Timing Diagrams 285
6.2.3 Main Memory Organization 287
6.3 Input/Output (I/O) 290
6.3.1 Simple I/O Devices 292
6.3.2 Programmed I/O 293
6.3.3 Interrupt I/O 295
6.4 CPU design using Verilog 296
Questions and Problems 309
7: MICROCONTROLLER BASICS 317
7.1 Basic Blocks of a Microcontroller 317
7.1.1 System Bus 318
7.1.2 Clock Signals 319
7.2 Microcontroller Architectures 320
7.3 Basic Concept of Pipelining 321
7.4 RISC vs. CISC 323
7.5 Functional Representation of a Typical RISC
Microcontroller—The PIC18F4321 324
7.6 Basics of Programming Languages 324
7.6.1 Machine Language 326
7.6.2 Assembly Language 327
7.6.3 High-Level Language 327
7.7 Choosing a Programming Language 328
7.8 Introduction to C Language 329
7.8.1 Data Types 332
7.8.2 Bit Manipulation Operators 333
7.8.3 Control Structures 334
7.8.4 The switch Construct 338
7.8.5 The while Construct 338
7.8.6 The for Construct 340
7.8.7 The do-while Construct 341
7.8.8 Structures and Unions 341
7.8.9 Functions in C 342
7.8.10 Macros 343
Questions and Problems 344
8: PIC18F HARDWARE AND INTERFACING USING C: PART 1 345
8.1 PIC18F Pins and Signals 345
8.1.1 Clock 346
8.1.2 PIC18F Reset 350
8.1.3 A Simplied Setup for the PIC18F4321 350
8.2 PIC18F4321 programmed I/O using C 351
8.2.1 PIC 18F4321 I/O ports 351
8.2.2 Interfacing LEDs (Light Emitting Diodes) and
Seven-segment Displays 354
8.2.3 Microchip MPLAB C18 compiler and the PICkit3 interface 355
Contents xi
8.2.4 Conguration commands 356
8.3 PIC18F Interrupts 359
8.3.1 PIC18F Interrupt Types 359
8.3.2 PIC18F External Interrupts in Default Mode 359
8.3.3 Interrupt Registers and Priorities 361
8.3.4 Setting the Triggering Levels of INTn Pin Interrupts 362
8.3.5 Programming the PIC18 interrupts using C 363
Questions and Problems 369
9: PIC18F HARDWARE AND INTERFACING USING C: PART 2 373
9.1 PIC18F Timers 373
9.1.1 Timer0 375
9.1.2 Timer1 378
9.1.3 Timer2 382
9.1.4 Timer3 384
9.2 PIC18F Interface to an LCD (Liquid Crystal Display) 390
9.3 Analog Interface 394
9.3.1 On-chip A/D Converter 395
9.3.2 Interfacing an External D/A (Digital-to-Analog)
Converter to the PIC18F4321 403
9.4 Serial Interface 405
9.4.1 Synchronous Serial Data Transmission 405
9.4.2 Asynchronous Serial Data Transmission 405
9.4.3 PIC18F Serial I/O 406
9.5 PIC18F4321 Capture/Compare/PWM (CCP) Modules 413
9.5.1 CCP Registers 413
9.5.2 CCP Modules and Associated Timers 413
9.5.3 PIC18F4321 Capture Mode 413
9.5.4 PIC18F4321 Compare Mode 416
9.5.5 PIC18F4321 PWM (Pulse Width Modulation) Mode 417
9.6 DC Motor Control 419
Questions and Problems 425
APPENDIX A: ANSWERS TO SELECTED PROBLEMS 429
APPENDIX B: GLOSSARY 439
APPENDIX C: TUTORIAL FOR COMPILING AND DEBUGGING A
C-PROGRAM USING THE MPLAB 451
APPENDIX D: INTERFACING THE PIC18F4321 TO A PERSONAL
COMPUTER OR A LAPTOP USING PICkit™ 3 479
D.1 INITIAL HARDWARE SETUP FOR THE PIC18F4321 479
D.2 CONNECTING THE PERSONAL COMPUTER (PC) OR THE
LAPTOP TO THE PIC18F4321 VIA PICkit3 480
D.3 PROGRAMMING THE PIC18F4321 FROM A PERSONAL
COMPUTER OR A LAPTOP USING THE PICkit3 482
BIBLIOGRAPHY 485
CREDITS 487
INDEX 489

xiii
PREFACE
The fth edition of the book covered basics of computer engineering and science from
digital logic to the design of a complete microcomputer system using Intel 8086 and
Motorola 68000. With the growing popularity of microcontrollers, it is now necessary
to have a clear understanding of the basic principles of microcontrollers at the
undergraduate level. Microcontrollers play an important role in the design of digital
systems. They are found in a wide range of applications including ofce automation
systems such as copiers and fax machines, consumer electronics such as microwave
ovens, digital instruments, and robotics.
Hence, a typical microcontroller such as Microchip Technology’s PIC18F
is used to replace the 8086 and 68000 in this edition. Several PIC18F-based simple
practical applications using C-language are provided. The sixth edition covers
an enhanced version of both combinational and sequential logic design, basics of
computer organization and microcontrollers.
Like the fth edition, emphasis is given on the basic concepts. To cite
an example, we clearly point out that computers understand only 0’s and 1’s. It is,
therefore, important that students be familiar with binary numbers. Furthermore, we
focus on the fact that computers can normally only add. Hence, all other arithmetic
operations such as subtraction are performed via addition. This can be accomplished
using two’s-complement arithmetic for binary numbers. This topic is, therefore, also
included along with a clear explanation of signed and unsigned binary numbers. Basic
concepts such as this are illustrated with simple examples throughout this edition.
As in the previous edition, three design levels are covered in this book:
device level, logic level, and system level. Device-level design using simple devices
such as transistors is included for typical logic gates such as NOT. Logic-level design
is the technique in which logic gates are used; design of digital components such as
an adder is provided. Finally, system-level applications are covered using a typical
microcontroller such as the PIC18F.
Digital systems at the logic level are classied into two types of circuits:
combinational and sequential. Combinational circuits have no memory whereas
sequential circuits contain memory. Microcontrollers are designed using both
combinational and sequential circuits. Therefore, these topics are covered in detail.
This edition of the book contains more details for synthesizing digital logic
circuits using a popular hardware description language such as Verilog. An overview
of contemporary digital circuit implementation using a popular programmable logic
device (PLD) such as eld programmable gate array (FPGA) along with the CAD
(computer aided design) tools is included.
xiv Preface
Several chapters in the previous edition containing digital logic design have
been retained and even strengthened in this edition. A few chapters of this new
edition are written to present the fundamental concepts of C language programming
and interfacing techniques associated with Microchip Technology’s PIC18F4321
microcontroller. The PIC18F family continues to be popular. The PIC18F family is
an excellent educational tool for acquiring an understanding of both hardware and
software aspects of typical microcontrollers.
Several PIC18F-based simple practical applications using C-language are
provided. Most of the examples are implemented successfully in the laboratory. In
summary, the sixth edition covers an enhanced version of both combinational and
sequential logic, basics of computer organization, and microcontrollers.
The following major changes have been provided in this edition:
r Revised Chapters 1 through 5 of the fth edition to update and strengthen certain
topics on both combinational and sequential circuits. Several new examples are
included. In addition, certain topics such as timing diagrams, hazards, stability,
and Verilog and FPGA are enhanced.
r Chapter 6 of this edition contains design of the CPU, memory, and I/O. Design of
both hardwired and microprogrammed CPU is included.
r Chapters 7 through 9 of this edition include microcontroller basics and PIC18F-
based applications using C.
In this edition, the book is divided into nine chapters as follow:
Chapter 1 presents an explanation of basic terminologies, fundamental concepts of
digital integrated circuits using transistors; a comparison of LSTTL, HC, and
HCT IC characteristics, evolution of the microcontroller, and technological
forecasts.
Chapter 2 includes various number systems and codes suitable for representing
information in typical digital systems.
Chapter 3 covers Boolean algebra along with k-map simplication of Boolean
functions. Several examples are included. The basic characteristics of digital
logic gates are also presented.
Chapter 4 presents the analysis and design of combinational circuits. Typical
combinational circuits such as adder, decoder, encoder, multiplexer,
demultiplexer, and ROMs are included. An introduction to PLDs and FPGA
is provided. Synthesis of combinational logic design using Verilog is also
included.
Chapter 5 covers various types of ip-ops. Analysis and design of sequential circuits
such as counters and registers are covered. An overview of topics such as ip-
op set-up time, hold time, and metastability is provided. Finally, synthesis of
sequential logic design using Verilog is included.
Preface xv
Chapter 6 introduces basic concepts associated with CPU, memory, and I/O. It also
covers the design of CPU including registers, ALU, and the control unit.
Chapter 7 presents basics of microcontroller including organization, memory, I/O,
and C programming concepts.
Chapter 8 provides typical C programs which include I/O examples with LEDs and
switches. PIC18F-based programmed and interrupt I/O using C are covered
in a simplied manner.
Chapter 9 contains simple PIC18F-based applications using C. These include A/D
and D/A converters, LCD displays, on-chip timers, DC voltmeter, and motor
control using PWM (pulse width modulation).
The book can easily be adopted as a text for “digital logic design” and/or
“introduction to microcontrollers” at the undergraduate level in electrical/computer
engineering and computer science. The book introduces microcontroller hardware
and software to form a bridge between digital logic and an advanced follow-up
course in microcontrollers. The book provides an introduction to one of today’s
popular microcontrollers, the PIC18F family. Although no advanced mathematical
background is required, a basic course on DC circuits is required. A rst course in
C language programming is essential. Since C language programming is prerequisite
for the course on microcontrollers, I/O and interfacing using C is included in this
book. The audience for this book can also be practicing engineers and scientists in the
industry. Practitioners of digital system design in the industry will nd more simplied
explanations, together with examples and comparison considerations, than are found
in manufacturers’ manuals.
The author is especially indebted to his colleague, Dr. R. Chandra, of
California State Polytechnic University, Pomona for reviewing the manuscript. The
author is also grateful to his students Robert Benenyan, Michael Hachache, Cameron
Chitsaz, Gagneet Bhatia, Luke Stankiewicz, and others for making constructive
suggestions and to CJ Media of California for preparing the nal version of the
manuscript. Finally, the author is indebted to his deceased parents, who were primarily
responsible for his accomplishments.
M. RAFIQUZZAMAN
Pomona, California

1
Fundamentals of Digital Logic and Microcontrollers, Sixth Edition. M. Raquzzaman.
© 2014 John Wiley & Sons, Inc. Published 2014 by John Wiley & Sons, Inc.
1
INTRODUCTION TO DIGITAL
SYSTEMS
Digital systems are designed to store, process, and communicate information in digital
form. They are found in a wide range of applications, including process control,
communication systems, digital instruments, and consumer products. The digital
computer, more commonly called the computer, is an example of a typical digital
system.
A computer manipulates information in digital, or more precisely, binary
form. A binary number has only two discrete values — zero or one. Each of these
discrete values is represented by the OFF and ON status of an electronic switch called
a transistor. All computers, therefore, only understand binary numbers. Any decimal
number (base 10, with ten digits from 0 to 9) can be represented by a binary number
(base 2, with digits 0 and 1).
The basic blocks of a computer are the central processing unit (CPU), the
memory, and the input/output (I/O). The CPU of the computer is basically the
same as the brain of a human. Computer memory is conceptually similar to human
memory. A question asked to a human is analogous to entering a program into the
computer using an input device such as the keyboard, and answering the question by
the human is similar in concept to outputting the result required by the program to a
computer output device such as the printer. The main difference is that human beings
can think independently, whereas computers can only answer questions that they are
programmed for. Computer hardware refers to components of a computer such as
memory, CPU, transistors, nuts and bolts. Programs can perform a specic task such
as addition if the computer has an electronic circuit capable of adding two numbers.
Programmers cannot change these electronic circuits but can perform tasks on them
using instructions.
Computer software, on the other hand, consists of a collection of programs.
Programs contain instructions and data for performing a specic task. These programs,
written using any programming language such as C, must be translated into binary
prior to execution by the computer. This is because the computer only understands
binary numbers. Therefore, a translator for converting such a program into binary
is necessary. Hence, a translator program called the compiler is used for translating
programs written in a programming language such as C into binary. These programs in
binary form are then stored in the computer memory for execution because computers
only understand 1’s and 0’s. Furthermore, computers can only add. This means that all
operations such as subtraction, multiplication, and division are performed by addition.
Due to advances in semiconductor technology, it is possible to fabricate the
CPU in a single chip. The result is the microprocessor. Both metal oxide semiconductor
(MOS) and bipolar technologies were used in the fabrication process. The CPU can
be placed on a single chip when MOS technology is used. However, several chips are
2 Fundamentals of Digital Logic and Microcontrollers
required with the bipolar technology. HCMOS (high speed complementary MOS) or
BICMOS (combination of bipolar and HCMOS) technology (to be discussed later in
this chapter) is normally used these days to fabricate the microprocessor in a single
chip. Along with the microprocessor chip, appropriate memory and I/O chips can be
used to design a microcomputer. The pins on each one of these chips can be connected
to the proper lines on the system bus, which consists of address, data, and control
lines. In the past, some manufacturers have designed a complete microcomputer on a
single chip with limited capabilities. Single-chip microcomputers were used in a wide
range of industrial and home applications.
“Microcontrollers” evolved from single-chip microcomputers. The micro-
controllers are typically used for dedicated applications such as automotive systems,
home appliances, and home entertainment systems. Typical microcontrollers, therefore,
include a microcomputer, timers, and A/D (analog to digital) and D/A (digital to
analog) converters — all in a single chip. Examples of typical microcontrollers are
Intel 8751 (8-bit) / 8096 (16-bit) and Motorola/Freescale HC11 (8-bit) / HC16 (16-bit),
and Microchip Technology PIC18F(8-bit)/PIC32(32-bit).
In this chapter, we rst dene some basic terms associated with the computers.
We then describe briey the evolution of the computers and the microcontrollers.
Finally, a typical practical application, and technological forecasts are included.
1.1 Explanation of Terms
Before we go on, it is necessary to understand some basic terms (arranged in
alphabetical order).
r Address is a pattern of 0’s and 1’s that represents a specic location in memory
or a particular I/O device. An 8-bit microcontroller with 16 address bits can
produce 2
16
unique 16-bit patterns from 0000000000000000 to 1111111111111111,
representing 65,536 different address combinations (addresses 0 to 65,535).
r Addressing mode is the manner in which the microcontroller determines the
operand (data) and destination addresses during execution of an instruction.
r Arithmetic-logic unit (ALU) is a digital circuit that performs arithmetic and logic
operations on two n-bit digital words. Typical operations performed by an ALU
are addition, subtraction, ANDing, ORing, and comparison of two n-bit digital
words. The size of the ALU denes the size of the microcontroller. For example,
an 8-bit microcontroller contains an 8-bit ALU.
r Big endian convention is used to store a 16-bit number such as 16-bit data in two
bytes of memory locations as follows: the low memory address stores the high
byte while the high memory address stores the low byte. The Motorola/Freescale
HC11 8-bit microcontroller follows the big endian format.
r Bit is an abbreviation for the term binary digit. A binary digit can have only two values,
which are represented by the symbols 0 and 1, whereas a decimal digit can have 10
values, represented by the symbols 0 through 9. The bit values are easily implemented
in electronic and magnetic media by two-state devices whose states portray either of
the binary digits 0 and 1. Examples of such two-state devices are a transistor that
is conducting or not conducting, a capacitor that is charged or discharged, and a
magnetic material that is magnetized north to south or south to north.
Introduction to Digital Systems 3
r Bit size refers to the number of bits that can be processed simultaneously by the
basic arithmetic circuits of a microcontroller. A number of bits taken as a group
in this manner is called a word. For example, an 8-bit microcontroller can process
an 8-bit word. An 8-bit word is referred to as a byte, and a 4-bit word is known
as a nibble.
r Bus consists of a number of conductors (wires) grouped to provide a means
of communication among different elements in a microcontroller system. The
conductors in a bus can be grouped in terms of their functions. A microcontroller
normally has an address bus, a data bus, and a control bus. Address bits are sent
to memory or to an external device on the address bus. Instructions from memory,
and data to/from memory or external devices, normally travel on the data bus.
Control signals such as read/write for the other buses and among system elements
are transmitted on the control bus. Buses are sometimes bidirectional; that is,
information can be transmitted in either direction on the bus, but normally in
only one direction at a time.
r Clock is analogous to human heart beats. The microcontroller requires
synchronization among its components, and this is provided by a clock or timing
circuits.
r The chip is an integrated circuit (IC) package containing digital circuits.
r CPU (central processing unit) contains several registers (memory elements), an
ALU, and a control unit. Note that the control unit translates instructions and
performs the desired task. The number of peripheral devices depends on the
particular application involved and may even vary within an application.
r EEPROM or E
2
PROM (electrically erasable programmable ROM) is nonvolatile.
EEPROMs can be programmed without removing the chip from the socket.
EEPROMs are called read most memories (RMMs) because they have much
slower write times than read times. Therefore, these memories are usually suited for
applications when mostly reading rather than writing is performed. An example
of EEPROM is the 2864 (8K x 8).
r EPROM (erasable programmable ROM) is nonvolatile. EPROMs can be
programmed and erased. The EPROM chip must be removed from the socket for
programming. This memory is erased by exposing the chip to ultraviolet light via
a lid or window on the chip. Typical erase times vary between 10 and 30 minutes.
The EPROM is programmed by inserting the chip into a socket of the EPROM
programmer, and providing proper addresses and voltage pulses at the appropriate
pins of the chip. An example of EPROM is the 2764 (8K 8).
r Flash memory is designed using a combination of EPROM and EEPROM
technologies. Flash memory is nonvolatile and is invented by Toshiba in mid
1980s. Flash memory can be programmed electrically while embedded on the
board. One can change multiple bytes at a time. An example of ash memory is
the Intel 28F020 (256K x 8). Flash memory is typically used in cell phones and
digital cameras.
r An FPGA (eld programmable gate array) chip contains an array of digital logic
blocks along with input and output blocks which can be connected together via
programming using a hardware description language (HDL) such as Verilog or
4 Fundamentals of Digital Logic and Microcontrollers
VHDL. There are two types of components inside an FPGA. These are lookup
table (stored in memory), and switch matrices. The concept of FPGA is based on
the fact that a combinational circuit can be implemented using memory. In the
past, digital logic circuits were built using all hardware (logic gates). It was a time-
consuming task to debug the circuits. However, digital circuits implemented using
FPGA’s are faster to debug since they are programmable. Note that it is much
faster to debug software than hardware. Hence, products can be developed using
FPGA from conceptual design via prototype to production in a very short time.
Therefore, use of FPGA in digital logic is very common these days.
r The term gate refers to digital circuits which perform logic operations such as
AND, OR, and NOT. In an AND operation, the output of the AND gate is one if
all inputs are one; the output is zero if one or more inputs are zero. The OR gate,
on the other hand, provides a zero output if all inputs are zero; the output is one
if one or more inputs are one. Finally, a NOT gate (also called an inverter) has one
input and one output. The NOT gate produces one if the input is zero; the output
is zero if the input is one.
r Harvard architecture is a type of CPU architecture which uses separate instruction
and data memory units along with separate buses for instructions and data.
This means that these processors can execute instructions and access data
simultaneously. Processors designed with this architecture require four buses for
program memory and data memory. These are one data bus for instructions, one
address bus for addresses of instructions, one data bus for data, and one address
bus for addresses of data. The sizes of the address and data buses for instructions
may be different from the address and data buses for data. Several microcontrollers
including the PIC18F are designed using the Harvard architecture. This is because
it is inexpensive to implement these buses inside the chip since both program and
data memories are internal to the chip.
r Instruction set of a microcontroller is a list of commands that the microcontroller
is designed to execute. Typical instructions are ADD, SUBTRACT, and STORE.
Individual instructions are coded as unique bit patterns which are recognized and
executed by the microcontroller. If a microcontroller has three bits allocated to the
representation of instructions, the microcontroller will recognize a maximum of
2
3
, or eight, different instructions. The microcontroller will then have a maximum
of eight instructions in its instruction set. It is obvious that some instructions
will be more suitable than others to a particular application. For example, in a
control application, instructions inputting digitized signals to the processor and
outputting digital control variables to external circuits are essential. The number
of instructions necessary in an application will directly inuence the amount of
hardware in the chip set and the number and organization of the interconnecting
bus lines.
r Little endian convention is used to store a 16-bit number such as 16-bit data in two
bytes of memory locations as follows: the low memory address stores the low byte
while the high memory address stores the high byte. The PIC18F microcontroller
follows the little-endian format.
r Microcomputer typically consists of a microprocessor (CPU) chip, input and output
chips, and memory chips in which programs (instructions and data) are stored.
Introduction to Digital Systems 5
r Microcontroller is implemented on a single chip containing a CPU, memory,
and IOP (I/O and peripherals). Note that a typical IOP contains I/O unit of a
microcomputer, timers, A/D (analog-to-digital) converter, analog comparators,
serial I/O, and other peripheral functions (to be discussed later).
r Microprocessor is the CPU of a microcomputer contained in a single chip, and
must be interfaced with peripheral support chips in order to function.
r Pipelining is a technique that overlaps instruction fetch (instruction read) with
execution. This allows a microcontroller’s processing operation to be broken down
into several steps (dictated by the number of pipeline levels or stages) so that the
individual step outputs can be handled by the microcontroller in parallel. Pipelining
is often used to fetch the microcontroller’s next instruction while executing the
current instruction, which speeds up the overall operation of the microcontroller
considerably. Microchip technology’s PIC18F (8-bit microcontroller) uses a two-
stage instruction pipeline in order to speed up instruction execution.
r Program contains instructions and data. Two conventions are used to store a
16-bit number such as 16-bit data in two bytes of memory locations. These are
called little endian and big endian byte ordering. In little endian convention, the low
memory address stores the low byte while the high memory address stores the high
byte. For example, the 16-bit hexadecimal number, 2050 will be stored as two bytes
in two 16-bit locations (Hex 5000 and Hex 5001) as follows: Address 5000 will
contain 50 while address 5001 will store 20. In big endian convention, on the other
hand, the low memory address stores the high byte while the high memory address
stores the low byte. For example, the same 16-bit hexadecimal number, 2050 will
be stored as two bytes in two 16-bit locations (Hex 5000 and Hex 5001) as follows:
Address 5000 will contain 20 while address 5001 will store 50. Motorola / Freescale
HC11 (8-bit microcontroller) follows big endian convention. Microchip PIC18F
(8-bit microcontroller), on the other hand, follows the little endian format.
r Random-access memory (RAM) is a storage medium for groups of bits or words
whose contents cannot only be read but can also be altered at specic addresses.
A RAM normally provides volatile storage, which means that its contents are lost
in case power is turned off. There are two types of RAM: static RAM (SRAM)
and dynamic RAM (DRAM). Static RAM stores data in ip-ops. Therefore,
this memory does not need to be refreshed. An example of SRAM is 6116 (2K
8). Dynamic RAM, on the other hand, stores data in capacitors. That is, it can
hold data for a few milliseconds. Hence, dynamic RAMs are refreshed typically
by using external refresh circuitry. Dynamic RAMs (DRAMs) are used in
applications requiring large memory. DRAMs have higher densities than static
RAMs (SRAMs). Typical examples of DRAMs are the 4464 (64K 4), 44256
(256K 4), and 41000 (1M 1). DRAMs are inexpensive, occupy less space, and
dissipate less power than SRAMs.
r Read-only memory (ROM) is a storage medium for the groups of bits called words,
and its contents cannot normally be altered once programmed. A typical ROM is
fabricated on a chip and can store, for example, 2048 eight-bit words, which can
be accessed individually by presenting to it one of 2048 addresses. This ROM is
referred to as a 2K by 8-bit ROM. 10110111 is an example of an 8-bit word that
might be stored in one location in this memory. A ROM is a nonvolatile storage

6 Fundamentals of Digital Logic and Microcontrollers
device, which means that its contents are retained in case power is turned off.
Because of this characteristic, ROMs are used to store permanent programs
(instructions and data).
r Reduced Instruction Set Computer (RISC) contains a simple instruction set. In
contrast, a Complex Instruction Set Computer (CISC) contains a large instruction
set. The PIC18F is an RISC-based microcontroller while Motorola/Freescale
HC11 is a CISC-based microcontroller.
r Register can be considered as volatile storage for a number of bits. These bits may
be entered into the register simultaneously (in parallel) or sequentially (serially)
from right to left or from left to right, 1-bit at a time. An 8-bit register storing the
bits 11110000 is represented as follows:
00001111
r The speed power product (SPP) is a measure of performance of a logic gate. It is
expressed in picojoules (pJ). SPP is obtained by multiplying the speed (ns) by the
power dissipation (mW) of a gate.
r Transistors are basically electronic switching devices. There are two types
of transistors. These are bipolar junction transistors (BJTs) and metal-oxide
semiconductor (MOS) transistors. The operation of the BJT depends on the ow
of two types of carriers: electrons (n-channel) and holes (p-channel), whereas the
MOS transistor is unipolar and its operation depends on the ow of only one type
of carrier, either electrons (n-channel) or holes (p-channel).
r von Neumann (Princeton) architecture uses a single memory unit and the same
bus for accessing both instructions and data. Although CPUs designed using
this architecture are slower compared to Harvard architecture since instructions
and data cannot be accessed simultaneously because of the single bus, typical
microprocessors such as the Pentium use this architecture. This is because memory
units such as ROMs, EPROMs, and RAMs are external to the microprocessor. This
will require almost half the number of wires on the mother board since address
and data pins for only two buses rather than four buses (Harvard architecture)
are required. This is the reason Harvard architecture would be very expensive if
utilized in designing microprocessors. Note that microcontrollers using Harvard
architecture internally will have to use von Neumann architecture externally.
Texas Instrument’s MSP 430 uses the von Neumann architecture.
1.2 Design Levels
Three design levels can be dened for digital systems: systems level, logic level,
and device level.
r Systems level is the type of design in which CPU, memory, and I/O chips are
interfaced to build a computer.
r Logic level is the design technique in which chips containing logic gates such as
AND, OR, and NOT are used to design a digital component such as the ALU.
r Finally, device level utilizes transistors to design logic gates.

Introduction to Digital Systems 7
1.3 Combinational and Sequential Circuits
Digital circuits at the logic level can be classied into two types. These are combinational
and sequential.
Combinational circuits contain no memory, whereas sequential circuits require
memory to remember the present state in order to go to the next state. A binary adder
capable of providing the sum upon application of the numbers to be added is an
example of a combinational circuit. For example, consider a 4-bit adder. The inputs
to this adder will be two 4-bit numbers; the output will be the 4-bit sum. In this case,
the adder will generate the 4-bit sum output upon application of the two 4-bit inputs.
Sequential circuits, on the other hand, require memory. The counter is an
example of a sequential circuit. For instance, suppose that the counter is required to
count in the sequence 0, 1, 2 and then repeat the sequence. In this case, the counter
must have memory to remember the present count in order to go to the next. The
counter must remember that it is at count 0 in order to go to the next count, 1. In order
to count to 2, the counter must remember that it is counting 1 at the present state. In
order to repeat the sequence, the counter must count back to 0 based on the present
count, 2, and the process continues. A chip containing sequential circuit such as the
counter will have a clock input pin.
In general, all computers contain both combinational and sequential circuits.
However, most computers are regarded as clocked sequential systems. In these
computers, almost all activities pertaining to instruction execution are synchronized
with clocks.
1.4 Digital Integrated Circuits
The transistor can be considered as an electronic switch. The ON and OFF states of a
transistor are used to represent binary digits. Transistors, therefore, play an important
role in the design of digital systems. This section describes the basic characteristics of
digital devices and logic families. These include diodes, transistors, and a summary of
digital logic families. These topics are covered from a very basic point of view. This
will allow the readers with some background in digital devices to see how they are
utilized in designing digital systems.
1.4.1 Diodes
A diode is an electronic switch. It is a two-terminal device. Figure 1.1 shows the
symbolic representation.
The positive terminal (made with the p-type semiconductor material) is called
the anode; the negative terminal (made with the n-type semiconductor material) is
called a cathode. When a voltage, V = 0.6 volt is applied across the anode and the
cathode, the switch closes and a current I ows from anode to the cathode.
Anode
Cathode
I
V
+
+
−
−
FIGURE 1.1 Symbolic representations of a diode.

8 Fundamentals of Digital Logic and Microcontrollers
1.4.2 Transistors
A bipolar junction transistor (BJT) or commonly called the transistor is also an
electronic switch like the diode. Both electrons (n-channel) and holes (p-channel) are
used for carrier ow; hence, the name “bipolar” is used. The BJT is used in transistor
logic circuits that have several advantages over diode logic circuits. First of all, the
transistor acts as a logic device called an inverter. Note that an inverter provides a
LOW output for a HIGH input and a HIGH output for a LOW input. Secondly,
the transistor is a current amplier (buffer). Transistors can, therefore, be used to
amplify these currents to control external devices such as a light emitting diode (LED)
requiring high currents. Finally, transistor logic gates operate faster than diode gates.
There are two types of transistors, namely npn and pnp. The classication
depends on the fabrication process. npn transistors are widely used in digital circuits.
Figure 1.2 shows the symbolic representation of an npn transistor. The
transistor is a three-terminal device. These are base, emitter, and collector. The
transistor is a current-controlled switch. This means that an adequate current at the
base will close the switch allowing a current to ow from the collector to the emitter.
This current direction is identied on the npn transistor symbol in Figure
1.2(a) by a downward arrow on the emitter. Note that a base resistance is normally
required to generate the base current.
The transistor has three modes of operation: cutoff, saturation, and active.
In digital circuits, a transistor is used as a switch, which is either ON (closed) or OFF
(open). When no base current ows, the emitter-collector switch is open and the
transistor operates in the cutoff (OFF) mode. On the other hand, when a base current
ows such that the voltage across the base and the emitter is at least 0.6 V, the switch
closes. If the base current is further increased, there will be a situation in which V
CE
(voltage across the collector and the emitter) attains a constant value of approximately
0.2 V. This is called the saturation (ON) mode of the transistor. The “active” mode
is between the cutoff and saturation modes. In this mode, the base current (I
B
) is
amplied so that the collector current, I
C
= I
B
, where is called the gain, and is in
the range of 10 to 100 for typical transistors. Note that when the transistor reaches
saturation, increasing I
B
does not drop V
CE
below V
CE (Sat.)
of 0.2 V. On the other hand,
V
CE
varies from 0.8 V to 5 V in the active mode. Therefore, the cutoff (OFF) and
saturation (ON) modes of the transistor are used in designing digital circuits. The
active mode of the transistor in which the transistor acts as a current amplier (also
called buffer) is used in digital output circuits.
Operation of the Transistor as an Inverter Figure 1.3 shows how to use the transistor
as an inverter. When V
IN
= 0, the transistor is in cutoff (OFF), and the collector-
emitter switch is open. This means that no current ows from +V
CC
to ground. V
OUT
is
equal to +V
CC
. Thus, V
OUT
is high.
FIGURE 1.2 (a and b) Symbolic representations of an npn transistor.
Collector
Emitter
Base
I
E
I
B
I
C
Base
Collector
Emitter
(a) npn )b(lobmysrotsisnarT Equivalent circuit

Introduction to Digital Systems 9
On the other hand, when V
IN
is HIGH, the emitter-collector switch is closed.
A current ows from +V
CC
to ground. The transistor operates in saturation, and V
OUT
= V
CE (Sat)
= 0.2 V ≈ 0. Thus, V
OUT
is basically connected to ground.
Therefore, for V
IN
= LOW, V
OUT
= HIGH, and for V
IN
= HIGH, V
OUT
= LOW.
Hence, the npn transistor in Figure 1.3 acts as an inverter.
Note that V
CC
is typically +5 V DC. The input voltage levels are normally
in the range of 0 to 0.8 volts for LOW and 2 volts to 5 volts for HIGH. The output
voltage levels, on the other hand, are normally 0.2 volts for LOW and 3.6 volts for
HIGH.
Light Emitting Diodes (LEDs) and Seven Segment Displays LEDs are extensively
used as outputs in digital systems as status indicators. An LED is typically driven by
low voltage and low current. This makes the LED a very attractive device for use with
digital systems. Table 1.1 provides the current and voltage requirements of red, yellow,
and green LEDs.
Basically, an LED will be ON, generating light, when its cathode is sufciently
negative with respect to its anode. A digital system such as a microcomputer can,
therefore, light an LED either by grounding the cathode (if the anode is tied to +5 V)
or by applying +5 V to the anode (if the cathode is grounded) through an appropriate
resistor value. A typical hardware interface between a microcomputer and an LED
is depicted in Figure 1.4. A microcomputer normally outputs 400 μA at a minimum
TABLE 1.1 Current and voltage requirements of LEDs
2.4V2.2V1.7 VVoltage
20 mA10 mA10 mACurrent
GreenYellowRedLEDs
FIGURE 1.3 An inverter.
C
E
R
+V
CC
B
B
R
C
V
OUT
V
IN
B
FIGURE 1.4 Microcomputer - LED interface.
R
+5 V
B
1
R
2
V
M
LED (Red)
I
μ
A
Microcomputer
= 400

10 Fundamentals of Digital Logic and Microcontrollers
voltage, V
M
= 2.4 volts for a HIGH. The red LED requires 10 mA at 1.7 volts. A buffer
(current amplier) such as a transistor is required to turn the LED ON. Since the
transistor is an inverter, a HIGH input to the transistor will turn the LED ON. We
now design the interface; that is, the values of R
1
, R
2
, and the gain for the transistor
will be determined. Note that the outputs of typical microcontrollers such as the
PIC18F are buffered.
A HIGH at the microcomputer output will turn the transistor ON into active
mode. This will allow a path of current to ow from the +5 V source through R
2
and
the LED to the ground. The appropriate value of R
2
needs to be calculated to satisfy
the voltage and current requirements of the LED. Also, suppose that V
BE
= 0.6 V
when the transistor is in active mode. This means that R
1
needs to be calculated with
the specied values of V
M
= 2.4 V and I = 400 μA. The values of R
1
, R
2
, and are
calculated as follows:
R
1
=
V
M
− V
BE
400 A
=
2.4 − 0.6
400 Aμμ
= 4.5 KΩ
Assuming V
CE
ý 0,
R
2
=
5 − 1.7 − V
CE
10 mA
=
5 − 1.7
10 mA
= 330
=
I
C
I
B
=
10 mA
400 A
=
10 × 10
−3
400 × 10
−6
= 25
μ
β
Ω
Therefore, the interface design is complete, and a transistor with a minimum
of 25, R
1
= 4.5 K, and R
2
= 330 are required.
An inverting buffer chip such as the 74LS04 can be used in place of a transistor
in Figure 1.4. A typical interface of an LED to a microcomputer via an inverter is
shown in Figure 1.5. Note that the transistor base resistance is inside the inverter.
Therefore, R
1
is not required to be connected to the output of the microcomputer. The
symbol is used to represent an inverter. Inverters will be discussed in more detail
later. In Figure 1.5, when the microcomputer outputs a HIGH, the transistor switch
inside the inverter closes. A current ows from the +5 V source, through the 330-ohm
resistor and the LED, into the ground inside the inverter. The LED is thus turned ON.
Note that if 5V is used to turn the LED ON and 0V to turn it OFF, the LED
should be connected as shown in Figure 1.6.
However, if 0 is used to to turn the LED ON and 5V to turn it OFF, the LED
should be connected as shown in Figure 1.7.
Note that an LED must not be connected according to the circuit shown in
Figure 1.8. This is because the circuit will not provide 1.7V accross the LED and a
current of 10 ma through it.
+5 V
LED
Microcomputer
330
Ω
Inverter
FIGURE 1.5 Microcomputer - LED interface via an inverter.

Introduction to Digital Systems 11
A seven-segment display can be used to display, for example, decimal numbers
from 0 to 9. The name “seven segment” is based on the fact that there are seven LEDs
— one in each segment of the display. Figure 1.9 shows a typical seven-segment display.
In Figure 1.9, each segment contains an LED. All decimal numbers from 0 to
9 can be displayed by turning the appropriate segment “ON” or “OFF”. For example,
a zero can be displayed by turning the LED in segment g “OFF” and turning the
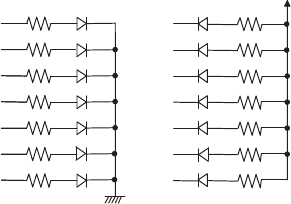
other six LEDs in segments a through f “ON.” There are two types of seven-segment
displays. These are common cathode and common anode. Figure 1.10 shows these
display congurations.
In a common cathode arrangement, the microcomputer can send a HIGH to
light a segment and a LOW to turn it off. In a common anode conguration, on the
other hand, the microcomputer sends a LOW to light a segment and a HIGH to turn
it off. In both congurations, R = 330 ohms can be used.
Transistor Transistor Logic (TTL) and Its Variations The transistor transistor logic
(TTL) family of chips evolved from diodes and transistors. This family used to be
FIGURE 1.8 An invalid LED connection.
330 ohm
5V
+
0V
or
FIGURE 1.7 An LED connection to be turned ON by 5V and turned OFF by 5V.
5V
+
0V
330 ohm
+ 5V
or
FIGURE 1.6 An LED connection to be turned ON by 5V and turned OFF by 0V.
5V
+
or
0V
330 ohm
FIGURE 1.9 A seven-segment display.
a
b
c
d
e
f
g
12 Fundamentals of Digital Logic and Microcontrollers
called DTL (diode transistor logic). The diodes were then replaced by transistors, and
thus the name “TTL” evolved. The power supply voltage (V
CC
) for TTL is +5 V. The
two logic levels are approximately 0 and 3.5 V.
There are several variations of the TTL family. These are based on the
saturation mode (saturated logic) and active mode (nonsaturated logic) operations of
the transistor. In the saturation mode, the transistor takes some time to come out of
the saturation to switch to the cutoff mode. On the other hand, some TTL families
dene the logic levels in the active mode operation of the transistor and are called
nonsaturated logic. Since the transistors do not go into saturation, these families
do not have any saturation delay time for the switching operation. Therefore, the
nonsaturated logic family is faster than saturated logic.
The saturated TTL family includes standard TTL (TTL), high-speed TTL
(H-TTL), and low-power TTL (L-TTL). The nonsaturated TTL family includes Schottky
TTL (S-TTL), low-power Schottky TTL (LS-TTL), advanced Schottky TTL (AS-TTL),
and advanced low-power Schottky TTL (ALS-TTL). The development of LS-TTL made
TTL, H-TTL, and L-TTL obsolete. Another technology, called emitter-coupled logic
(ECL), utilizes nonsaturated logic. The ECL family provides the highest speed. ECL is
used in digital systems requiring ultrahigh speed, such as supercomputers.
The important parameters of the digital logic families are fan-out, power
dissipation, propagation delay, and noise margin.
Fan-out is dened as the maximum number of inputs that can be connected
to the output of a gate. It is expressed as a number. The output of a gate is normally
connected to the inputs of other similar gates. Typical fan-out for TTL is 10. On the
other hand, fan-outs for S-TTL, LS-TTL, and ECL, are 10, 20, and 25, respectively.
Power dissipation is the power (milliwatts) required to operate the gate. This
power must be supplied by the power supply and is consumed by the gate. Typical
power consumed by TTL is 10 mW. On the other hand, S-TTL, LS-TTL, and ECL
absorb 22 mW, 2 mW, and 25 mW respectively.
Propagation delay is the time required for a signal to travel from input to
output when the binary output changes its value. Typical propagation delay for TTL is
10 nanoseconds (ns). On the other hand, S-TTL, LS-TTL, and ECL have propagation
delays of 3 ns, 10 ns, and 2 ns, respectively.
Noise margin is dened as the maximum voltage due to noise that can be
added to the input of a digital circuit without causing any undesirable change in the
circuit output. Typical noise margin for TTL is 0.4 V. Noise margins for S-TTL, LS-
TTL, and ECL are 0.4 V, 0.4 V, and 0.2 V, respectively.
FIGURE 1.10 Seven-segment display congurations.
+5 V
R
R
R
R
R
R
R
g
f
e
d
c
b
a
R
R
R
R
R
R
R
Common Cathode
Common Anode
g
f
e
d
c
b
a
